Uzdevums: pārvadīt griezes momentu no elektromotora caur reduktoru un piedzīt ķēdes transportieri.
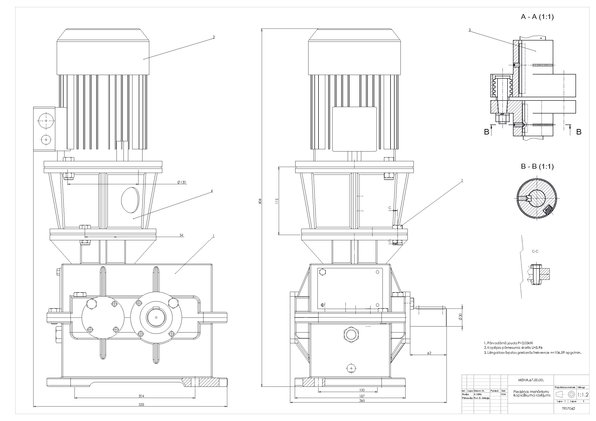
Uzbūve: proektējamais piedziņas mehānisms sastāv no elektromotora, sajūgiem un divkāpju zobrata reduktora.
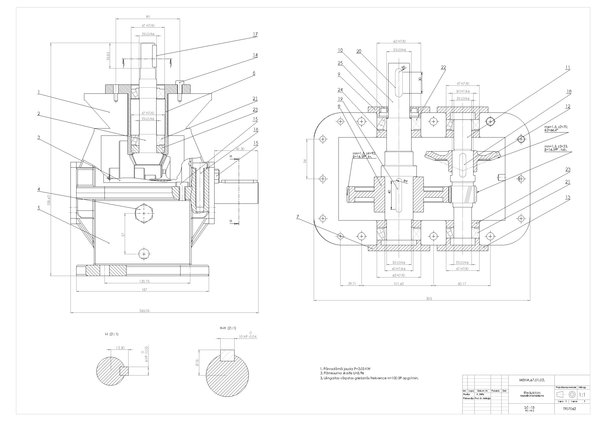
Reduktors ir koniski-cilindrisks. Darbības princips: griezes momentu pārvada caur elastīgo sajūgu uz reduktora ātrgaitas vārpstu, tālāk caur konisko zobratu ātrgaitas pakāpi uz starpvārpstu, no starpvārpstas caur cilindrisko slīpzobu zobratu lēngaitas pakāpi uz lēngaitas vārpstu, caur zobsajūgu uz ķēdes konveijera dzenošo vārpstu uz kuras nostiprinātas konveijera ķēžu zvaigznītes.
Mehānisma raksturojums :
- zvaigznīšu aploces spēks Ft = 2 kN;
- zvaigznītes zobu skaits z = 7;
- konveijera ķēdes solis t = 80 mm;
- ķēdes ātrums v = 1 m/s;
- ekvivalentās slodzes grafika numurs - 33;
- darbmūžs L = 10 gados ;
- relatīvais ieslēgšanas ilgums R = 15 % ;
- mehānisma izmantošanas koeficients Kd = 0,1 (diennaktī)
- Kg = 0,2 (gadā);
- slodzes klase H 0,315 ; ekvivalentais koeficients K HE = 0,315.
- ražošanas apjoms – sīksēriju.…