Darba uzdevums:
1.Noteikt sistēmas kinemātiskās nenoteicamības pakāpi;
2.Izvēlēties spēku metodes pamatsistēmu;
3.Uzkonstruēt vienības un slodzes epīras;
4.Atrast kanonisko vienādojumu koeficientus un brīvos locekļus;
5.Noteikt lieko nezināmo skaitliskās vērtības;
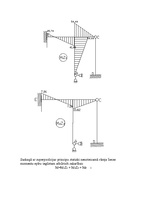
6.Uzkonstruēt M,Q un N epīras;
7.Aprēķina gaitā veikt nepieciešamās pārbaudes.
Aprēķini.
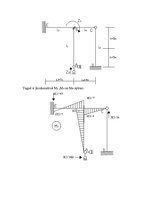
Izvēloties pamatsistēmu ievedam iespīlējumus stingajā mezglā B. Tam atbilst nezināmais pagrieziena leņķis Z1. Lai noteiktu, cik lineārās saites jāieved, atrodam kustības brīvības pakāpi sistēmai, kurai visos mezglos, ieskaitot balstus, ievestas locīklas. Lai noteiktu rāmja brīvības pakāpi, izmantojam sakarību, ka:
w =3*4-2*3-5=12-5-6=1 , tātad būs viena lineāra saite, kam atbildīs nezināmais Z2.…